# 扩容Docker分区
ARS2自带是8G EMMC,除开系统占用,会剩余6G多,自动划分到Docker数据分区,常理来说,6G是完全够运行一般的Docker项目。
但是docker项目大小不一,可能有些小伙伴玩的项目体积比较大,6G容量不够, 那么就需要扩容Docker数据分区。
# 开始扩容:
扩容前,先停用已部署的docker项目,扩容完成后重新部署。若当前无docker项目,直接开始扩容。
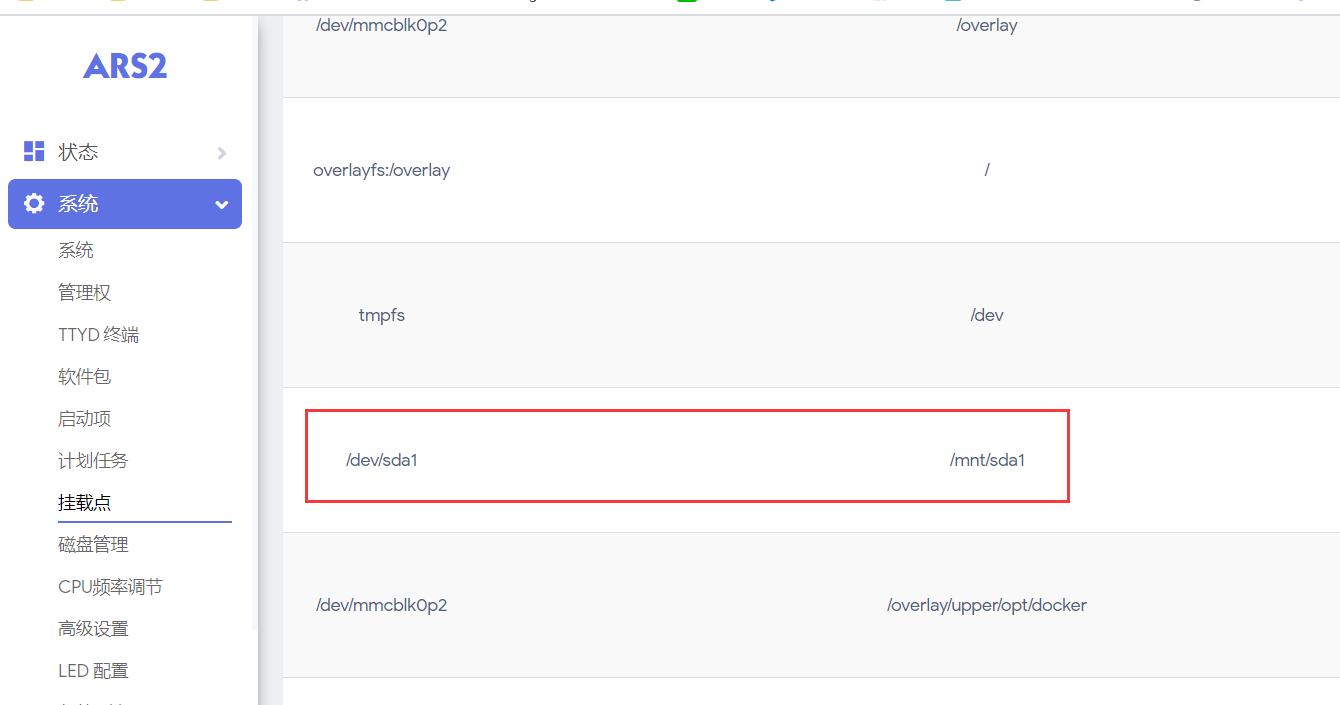
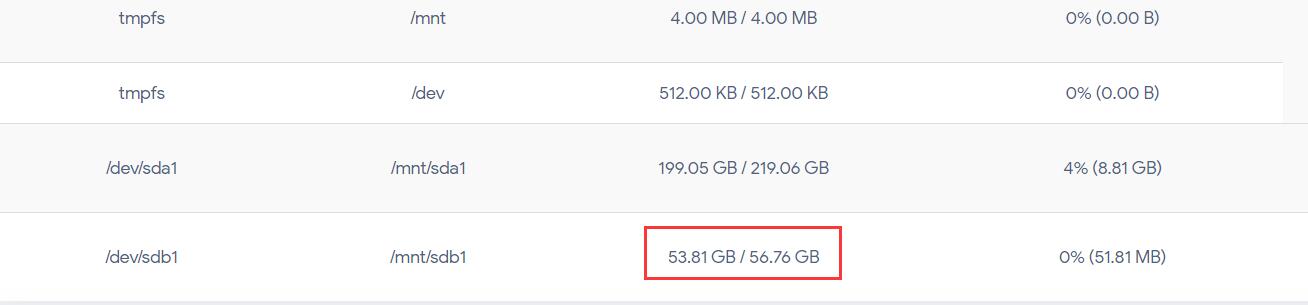
确定自己已经挂载了硬盘,可以看挂载点里的信息。比如我的硬盘路径就是/mnt/sda1。

然后在/mnt/sda1建立一个docker文件夹,最终路径为:/mnt/sda1/docker。
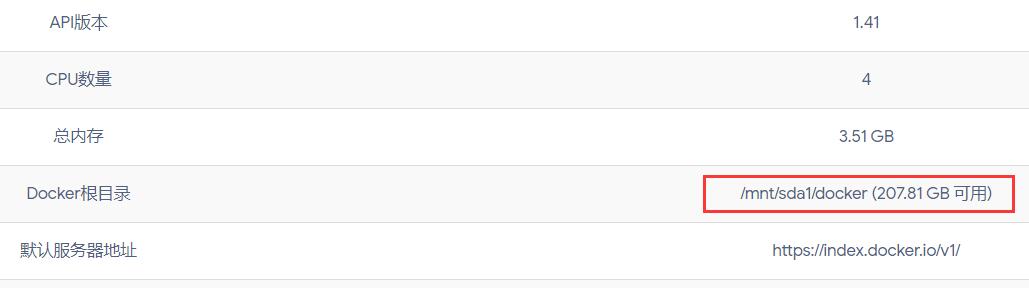
进入Docker——概况——设置,根目录填入/mnt/sda1/docker,然后保存应用。

- 扩容完成,然后就能畅快的部署Docker项目了。
# 玩转影音
# Jellyfin安装
Jellyfin是一个优秀的家庭影院平台,而ARS2支持4K H265(HEVC),H264等格式硬解,这样我们就可以把ARS2打造成您的私人家庭影院。
# 1.ARS2上安装硬盘,或者移动硬盘;
# 2.进入ARS2的管理界面—系统—挂载点,挂载好硬盘,记住路径;
比如教程演示机的路径挂载点是:/mnt/sda1
# 3.iStore安装Jellyfin,安装完成打开;

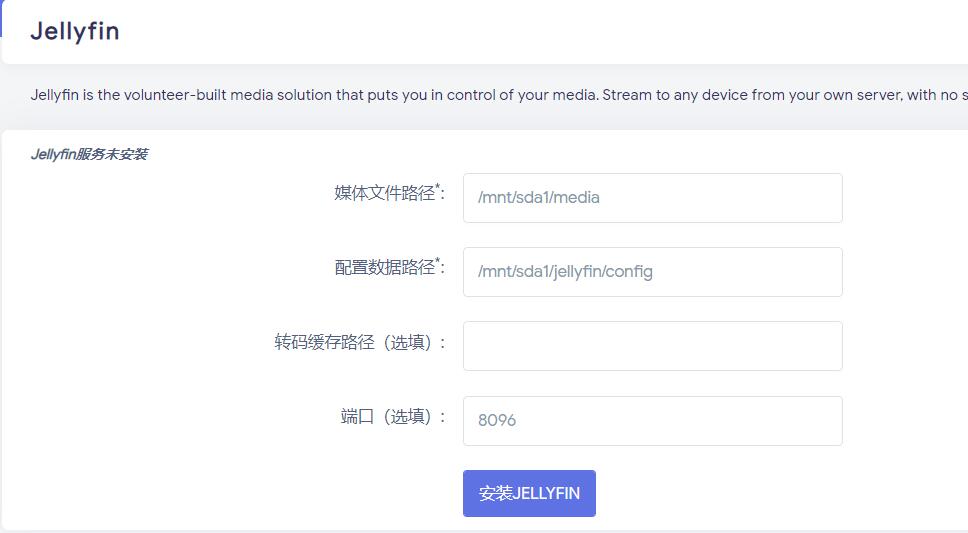
# 4.配置Jellyfin(建议先看说明),配置完成后点击安装:
说明:
媒体文件路径:Jellyfin媒体库路径,按需修改。可指定文件夹,例如:/mnt/sda1/media。
配置数据路径:Jellyfin的配置路径,默认/root/jellyfin/config,建议改到硬盘目录下,如:/mnt/sda1/jellyfin/config按需修改。
转码缓存路径:可不设置,按需修改。例如:/mnt/sda1/jellyfin/cache。
端口:默认8096,按需修改。
有些伙伴网络不佳,所以提供离线镜像下载。离线镜像下载 (opens new window)
下载想要的镜像压缩包,然后解压得到镜像:
解压出来的镜像:jellyfin-rtk.tar
然后把镜像放入ARS2的磁盘,比如/mnt/sda1/下;
然后终端执行命令导入离线镜像:
docker load -i /mnt/sda1/jellyfin-rtk.tar
# 5.安装Jellyfin完成后,打开Jellyfin,即可进入Jellyfin视界(首次进入需要设置)。 配置教程 (opens new window) -->
# 易有云两大拳头产品,助力Jellyfin随时随地远程在线观影。
# DDNSTO远程观影教程 (opens new window) -->
# 易有云App远程观影教程 (opens new window) -->
# Jellyfin简易配置
# 1.Jellyfin安装好以后,打开(设备IP+8096端口):设置显示语言为简体中文,设置用户名和密码;


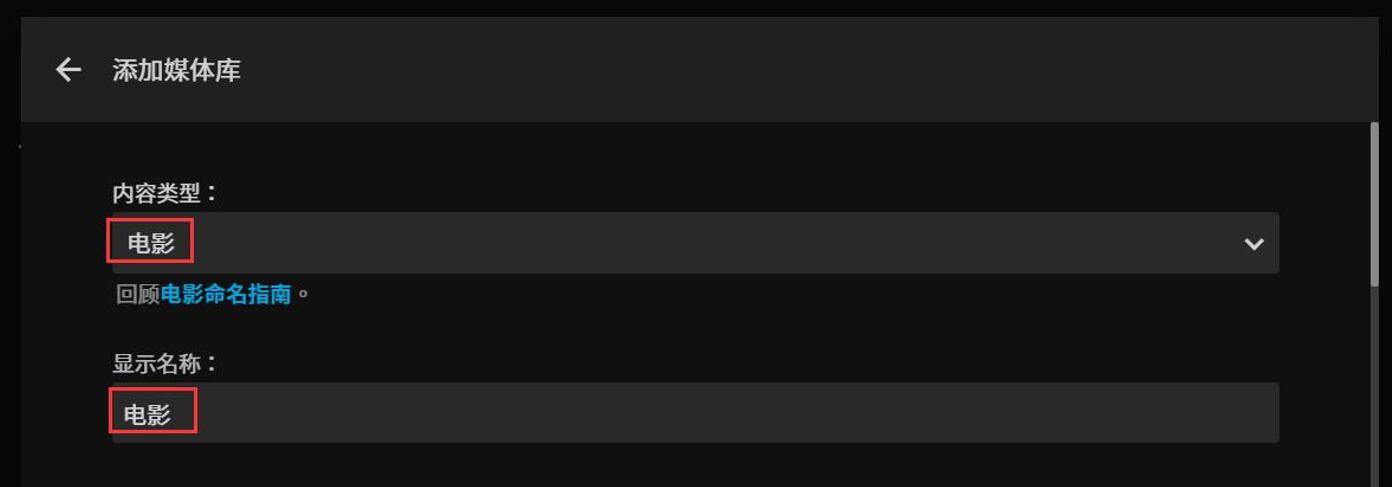
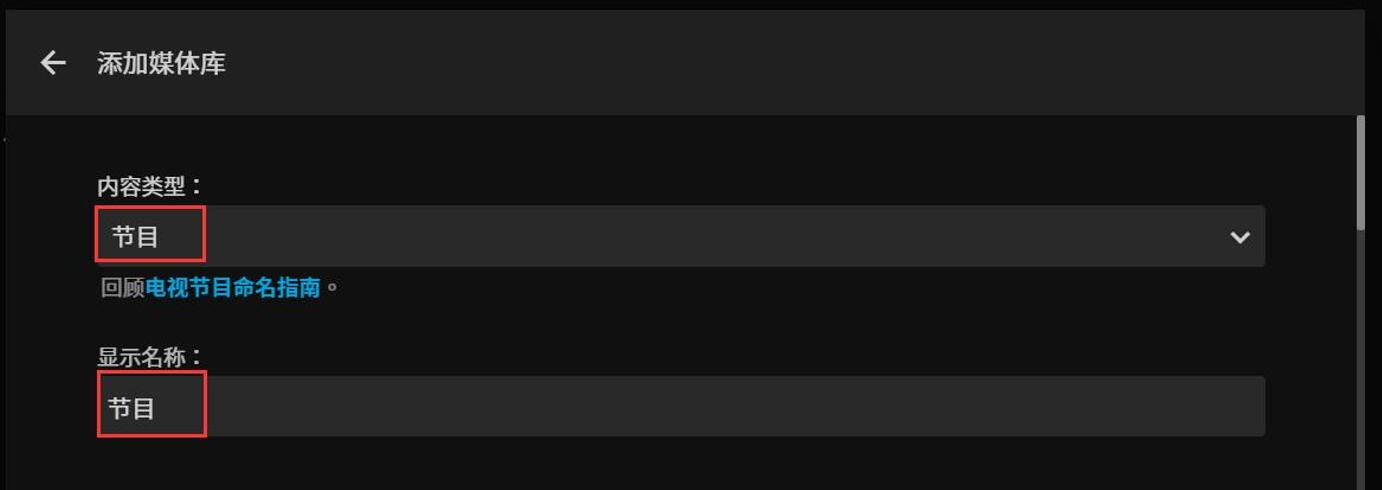
# 2.添加媒体库:
- 选好内容类型(电影、节目(电视剧)、音乐等);
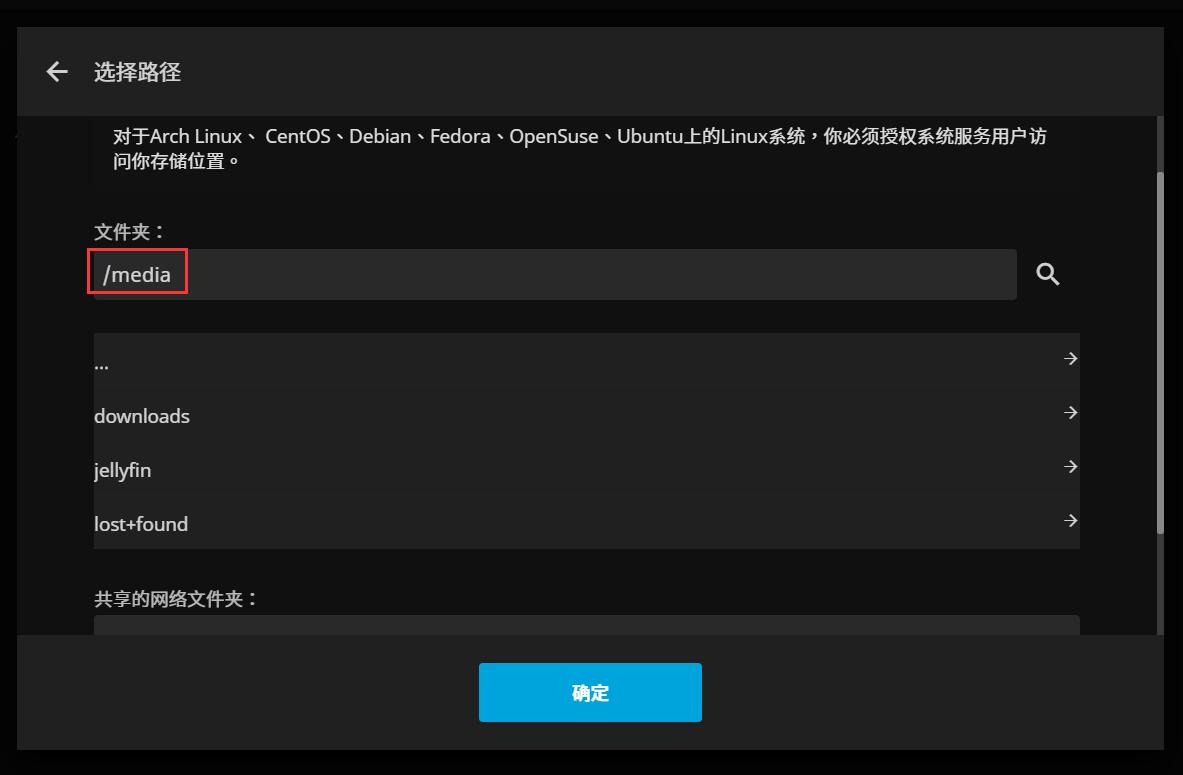
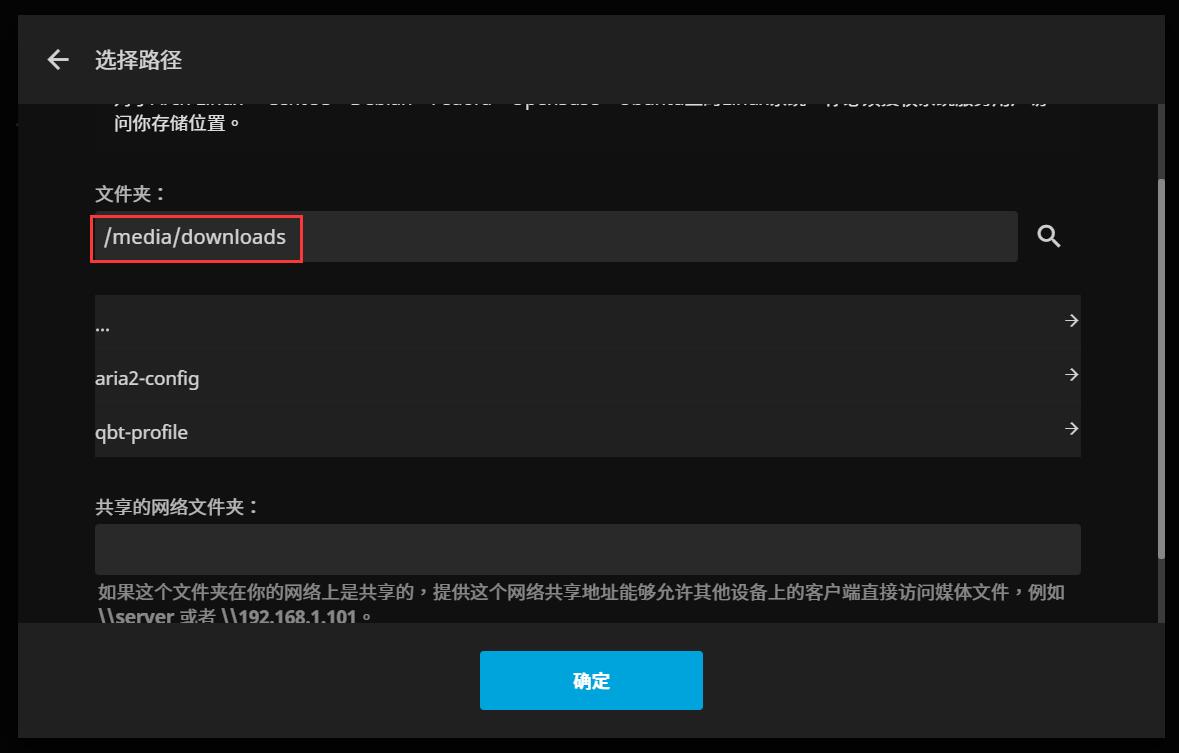
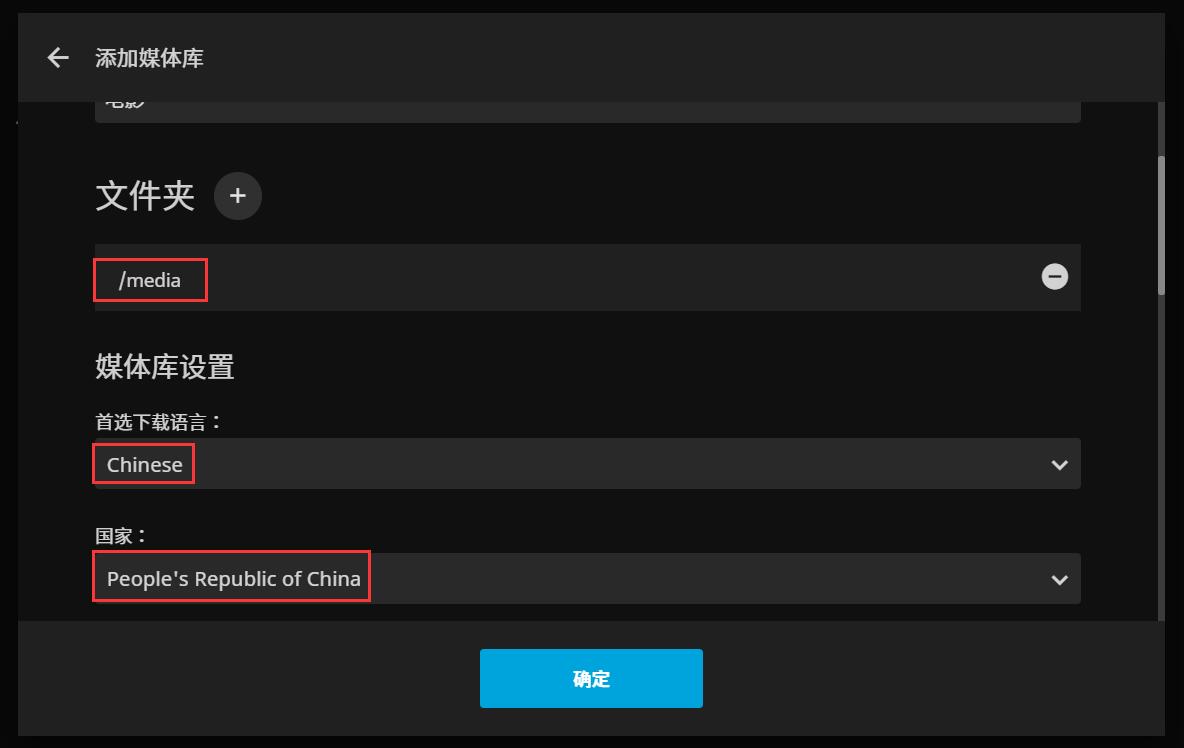
选择媒体库路径:
前面我们安装的时候“媒体文件路径”,是映射到了Jellyfish的/media路径,所以选择/media;
如果我们在“媒体文件路径”下创建了任何文件夹,也能直接在/media选到文件夹;
如果是比较新的固件和jellyfin插件,还可以直接使用/mnt下挂载的磁盘。
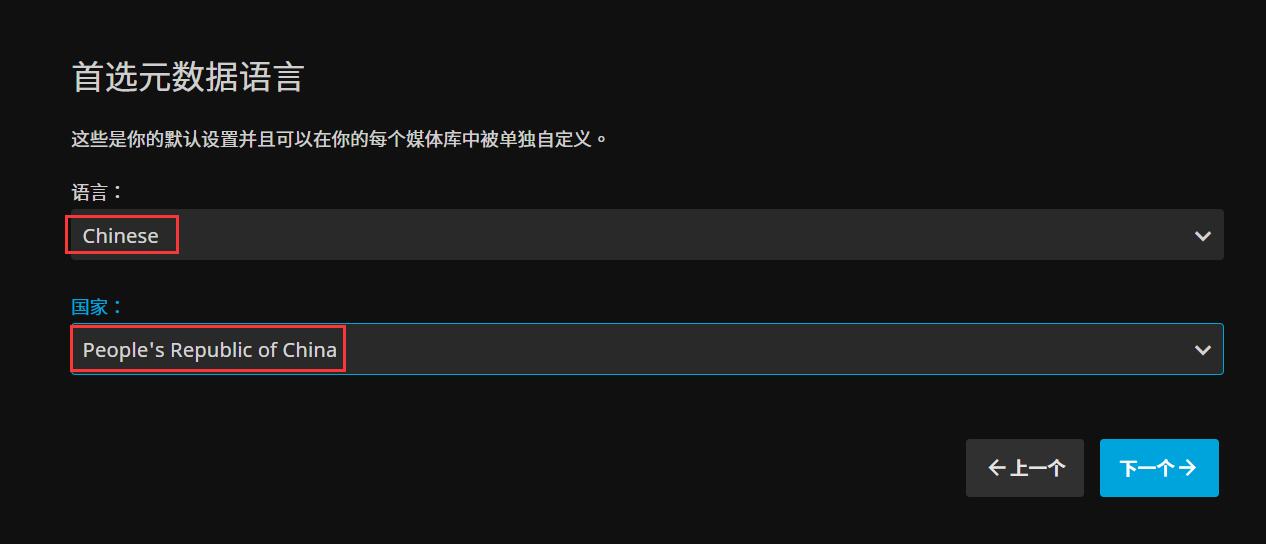
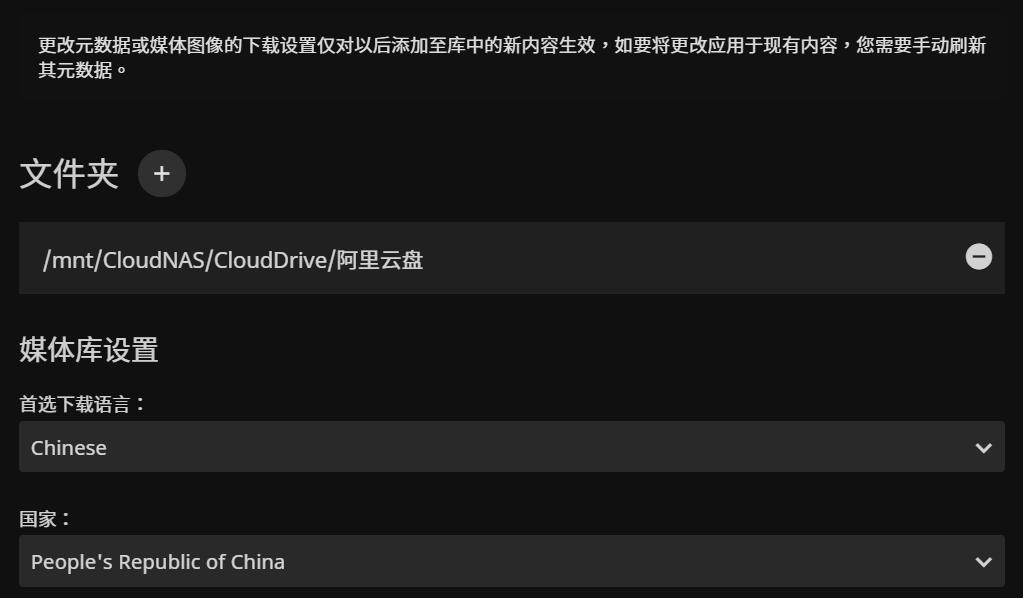
- 设置首选下载语言(中文)和国家(中国);
- 下面的刮削器设置默认,然后保存确定,下一步;
# 3.设置完成,登录框,填入之前设置的用户名和密码即可进入Jellyfish视界。

# 4.进入Jellyfin视界后,无需去动硬件加速选项。
- 因为Jellyfish镜像的安装过程中已经配置好硬解,无需再去设置。

# Jellyfin豆瓣刮削器
众所周知,Jellyfin自带刮削器受限于网络,可能不是很好刮削,所以添加国内的豆瓣刮削。
# 1.首先下载豆瓣刮削插件下载地址 (opens new window);

下载后解压得到插件文件夹:

# 2.然后查看上一步安装Jellyfish的配置数据路径,比如/mnt/sda1/jellyfin/config;
一般来说我们都会设置samba共享,方便局域网内访问,若没设置,参考samba共享教程 (opens new window)
设置好samba共享后,直接电脑进入
\\192.168.xxx.xxx,进入ARS2挂载的硬盘,找到此目录sda1/jellyfin/config/plugins,把插件文件夹放进去,然后重启Jellyfish服务器。


- 若有伙伴配置数据路径还是在/root/,建议改到/mnt/挂载的硬盘下。
# 3.重启完成后,在插件里就能看到Douban了。
# 4.然后,在媒体库——管理媒体库中,在元数据/图片等勾选"Douban",并置顶为第一位。

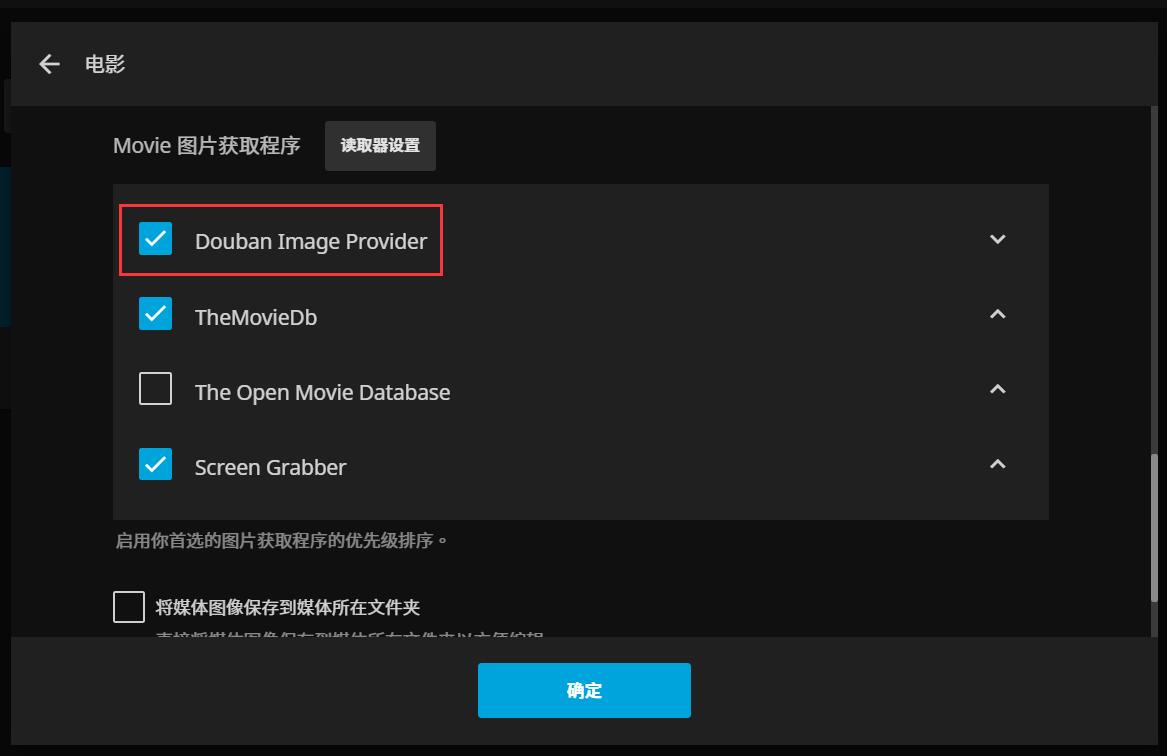
# 5.这样就能享受豆瓣的刮削了。

# 网盘影院之CloudDrive
CloudDrive 是一个将云存储(阿里云盘、115网盘等)服务挂载为本地文件的系统。
- 利用CloudDrive可将网盘的影视资源挂载到ARS2,然后利用Jellfin加载这些影视资源,搭建强大的家庭影院。
- 为简化配置,请将固件升级到19.07.8 r11804以后版本。
- 若只是简单的想观看阿里云盘里的影视资源,建议使用阿里云盘Fuse,操作简单。阿里云盘Fuse教程 (opens new window)
# 现在开始安装CloudDrive:
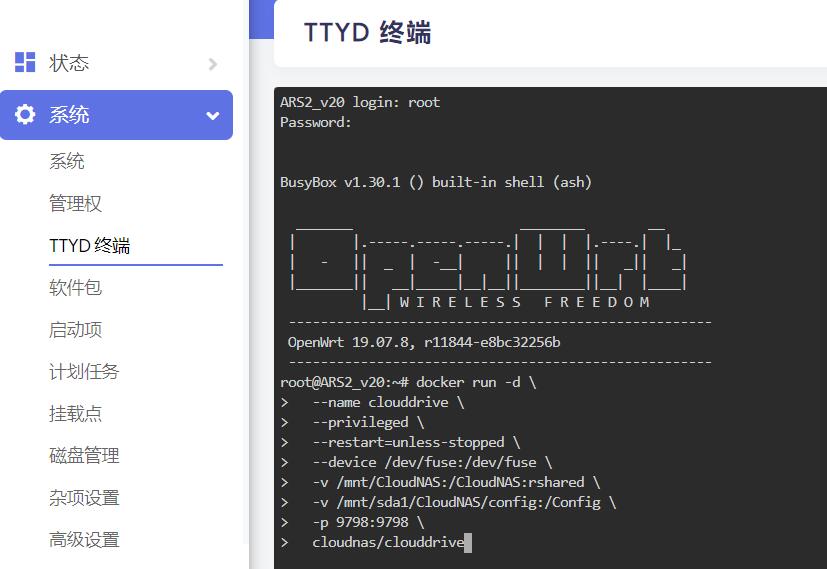
# 1.安装Docker版CloudDrive,终端运行如下命令(先别直接复制输入,下方有说明):
docker run -d \
--name clouddrive \
--privileged \
--restart=unless-stopped \
--dns=172.17.0.1 \
--device /dev/fuse:/dev/fuse \
-v /mnt/CloudNAS:/CloudNAS:rshared \
-v /mnt/sda1/CloudNAS/config:/Config \
-p 9798:9798 \
cloudnas/clouddrive
说明:
-v /mnt/CloudNAS:/CloudNAS:rshared \ ##CloudDrive 磁盘映射挂载点,无需修改
-v /mnt/sda1/CloudNAS/config:/Config \ ##CloudDrive 配置文件夹,/mnt/sda1/CloudNAS/config可改成其他合适的文件夹
- 如果启动失败,请将固件升级到19.07.8 r11804以后版本。
# 2.上面2条命令完成以后,管理界面—Docker—容器,就能看到CloudDrive已经运行起来了;

# 3.浏览器打开设备对应IP加上9798端口,例如 http://ars2.lan:9798/ (opens new window) 或者 http://192.168.100.1:9798/ (opens new window) ,即可进入CloudDrive界面。
ps:CloudDrive是需要注册登录,没帐号的,请注册。
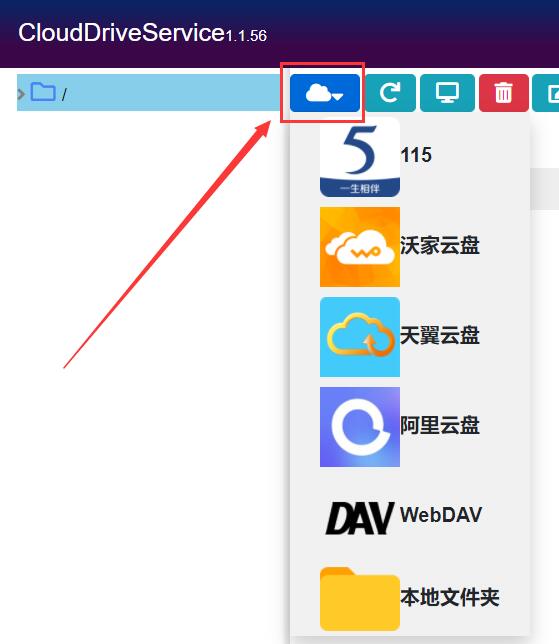
# 4.进入CloudDrive界面后,开始添加网盘帐号(阿里云、115网盘等)。
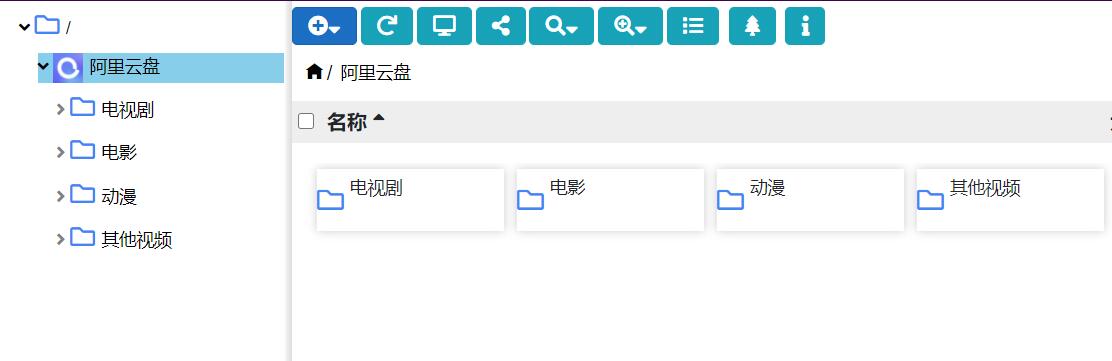
添加完阿里云盘后,内容就加载出来了:
# 5.回到管理界面,打开系统——挂载点,已经挂载CloudDrive,相当于多了一个CloudDrive硬盘;
- 挂载点路径是:/mnt/CloudNAS/CloudDrive。

# 6.可将CloudDrive盘利用Samba等协议共享出去,其他设备就能直接访问CloudDrive盘。
# Jellyfin加载网盘资源
# 1.进入到Jellyfin界面添加媒体库,网盘资源路径是/mnt/CloudNAS/CloudDrive,应该已经加载出来了:
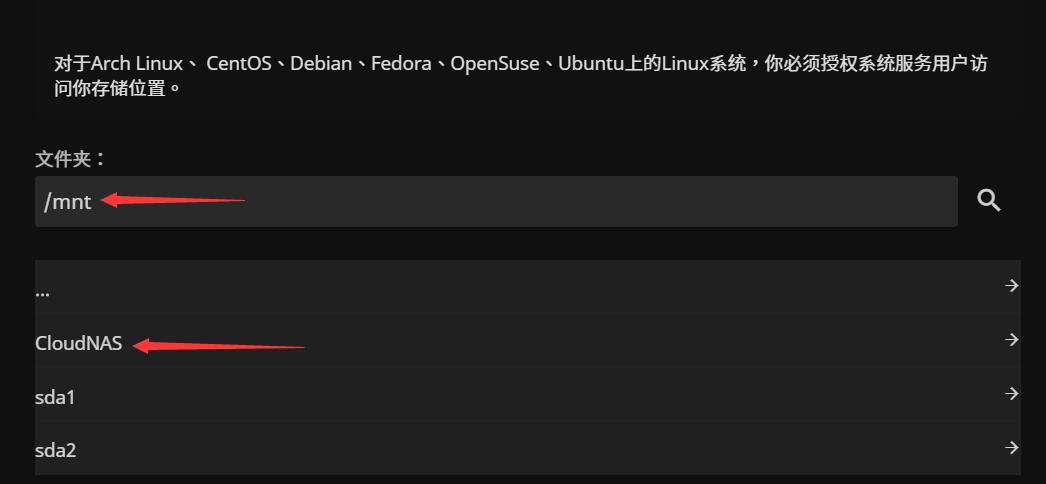
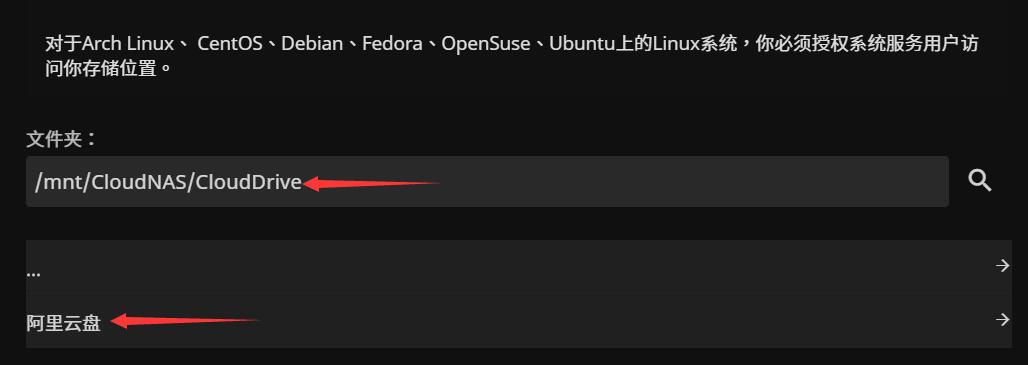
# 2.可以直接将/mnt/CloudNAS/CloudDrive添加,也可以选择下一级合适的文件夹;
# 3.添加完媒体库,等待扫描刮削完成。(若选择文件夹资源很多,扫描刮削就比较慢,慢慢等就成)。

# 网盘影院之阿里云盘Fuse
阿里云盘Fuse磁盘挂载,用于配合Emby或者Jellyfin观看阿里云盘内容,目前只读,不支持写入,操作更加简单。
# 1.从iStore安装阿里云盘Fuse插件;
# 2.打开服务——阿里云盘Fuse:
启用:勾选
Refresh Token:根据教程获取Token,并填入,Refresh Token很容易失效,基本三五天就要更换一次
挂载点:可默认,也可自定义,比如/mnt/yun
其余选项默认,然后保存应用

# 3.运行成功后,终端输入 ls /mnt/aliyundrive ,看到和我们阿里网盘一样的目录内容,证明挂载成功。
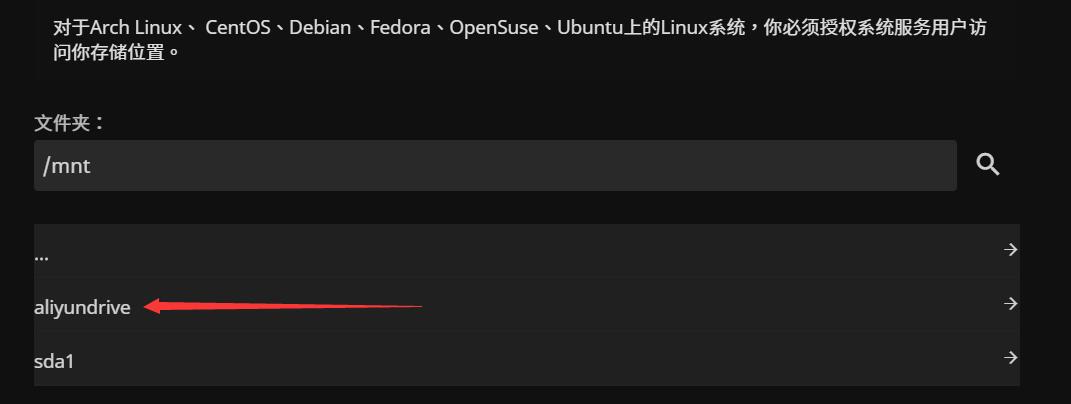
# 4.进入到Jellyfin界面添加媒体库,网盘资源路径是/mnt/aliyundrive,应该已经加载出来了。
# 5.添加完媒体库,等待扫描刮削完成即可。
# Ubuntu
带Web远程桌面的Docker版Ubuntu,纯英文系统,欢迎各位极客体验。
# 1.ARS2接入硬盘,然后扩容Docker数据分区。
- Ubuntu镜像很大,所以需要扩容docker数据分区。扩容Docker分区教程 (opens new window)
# 2.应用商店里安装Ubuntu;
# 3.获取镜像;
- 方法一:终端输入下列命令获取镜像:
自行选择全量版本或者标准版本,二选一。
全量版本:(包含WPS、中文输入法等,镜像3.5G左右。)
docker pull linkease/desktop-ubuntu-full-arm64:latest
标准版本:(单纯的系统,镜像1.6G左右。)
docker pull linkease/desktop-ubuntu-standard-arm64:latest
- 方法二:下载离线镜像导入;
有些伙伴网络不佳,所以提供离线镜像下载。离线镜像下载 (opens new window)
下载想要的镜像压缩包,然后解压得到镜像:
标准版本解压出来的镜像:desktop-ubuntu-standard-arm64.tar
全量版本解压出来的镜像:desktop-ubuntu-full-arm64.tar
然后把镜像放入ARS2的磁盘下,比如/mnt/sda1/下;
然后终端执行命令导入离线镜像:
标准版本:
docker load -i /mnt/sda1/desktop-ubuntu-standard-arm64.tar
全量版本:
docker load -i /mnt/sda1/desktop-ubuntu-full-arm64.tar
# 4.然后打开Ubuntu,进行配置;

端口:默认6901,可自定义;密码:默认password,可自定义;
系统版本:上一步拉取的啥版本镜像,就选择啥版本。
设定好以后,点击“安装ubuntu”。
点击“安装ubuntu”提示“docker not in disk”,请参考第一步扩容Docker分区。

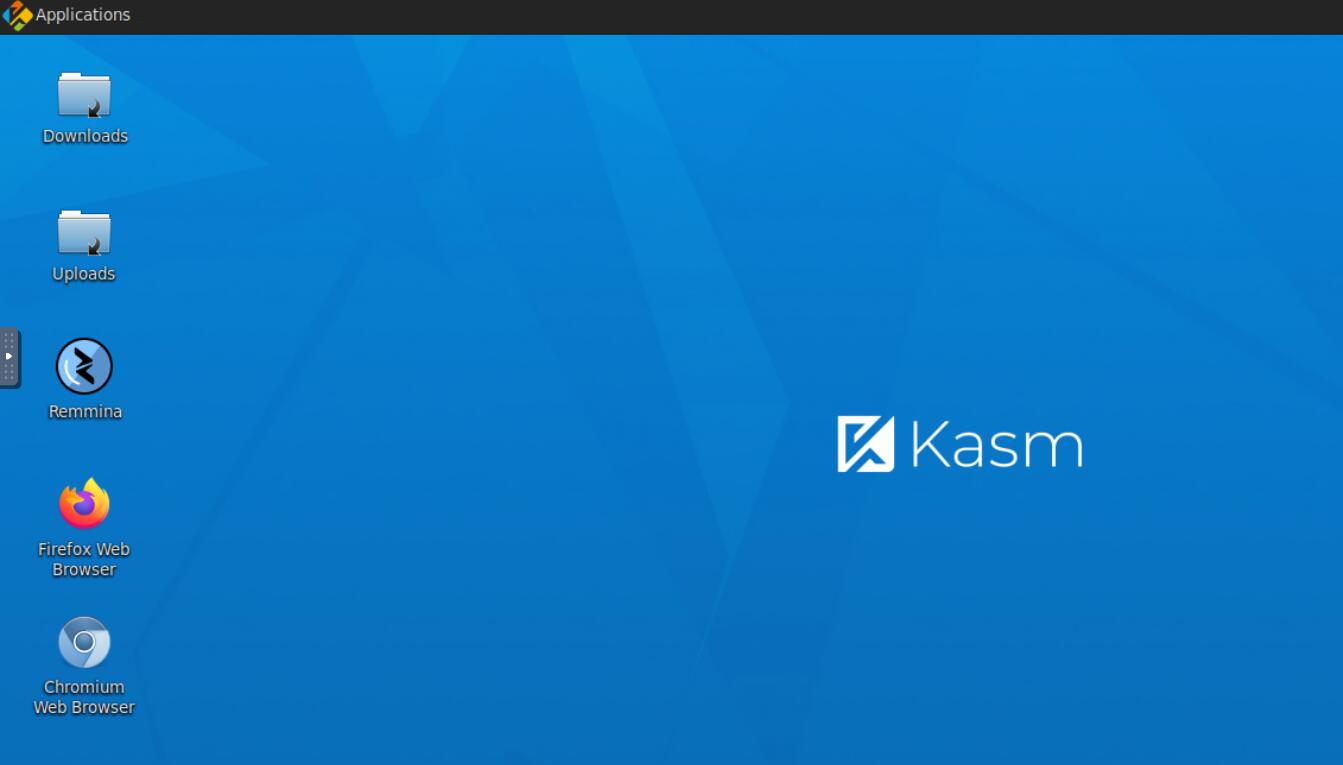
# 5.安装完成以后,点击“打开ubuntu”,进入web远程桌面。输入用户名和密码进入ubuntu系统。

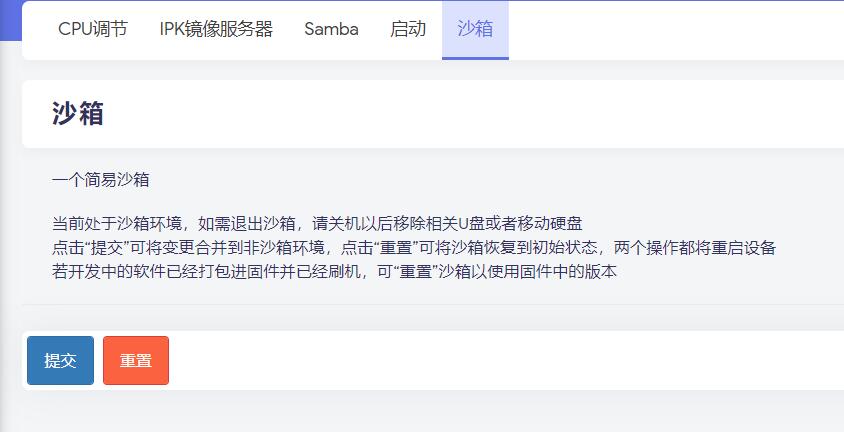
# 简易沙箱
简易沙箱实际是多层OverlayFS,方便用来实验系统配置和程序,方便开发未完成的软件,但不保护Docker和硬盘的数据。
# 1.准备一个U盘或者移动硬盘(建议U盘),然后分区格式化成ext4。
 演示为64G的U盘。
演示为64G的U盘。
# 2.U盘插入到ARS2上,然后进入挂载点——添加——选择U盘,挂载点:作为外部 overlay 使用。

# 3.上一步保存应用后,重启设备。然后进入系统——杂项设置——沙箱。
# Home Assistant
一款优秀的家庭自动化平台,您的智能家居好帮手。
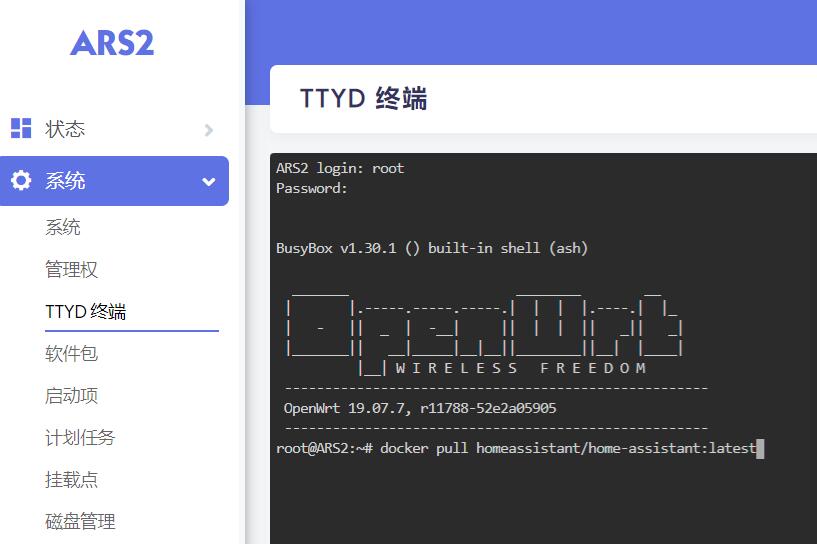
# 1.Docker拉取homeassistant镜像,进入终端,输入下面的命令并回车运行;
docker pull homeassistant/home-assistant:latest
# 2.接着继续输入如下命令并回车运行,创建homeassistant容器(先别直接复制输入,下方有说明);
docker run -d \
--name homeassistant \
--privileged \
--restart=unless-stopped \
-e TZ="Asia/Shanghai" \
-v /root/homeassistant/config:/config \
--network=host \
homeassistant/home-assistant:latest
说明:
/root/homeassistant/config 用来存放homeassistant的配置文件,按需修改。

# 3.上面2条命令完成以后,管理界面—Docker—容器,就能看到homeassistant已经运行起来了;
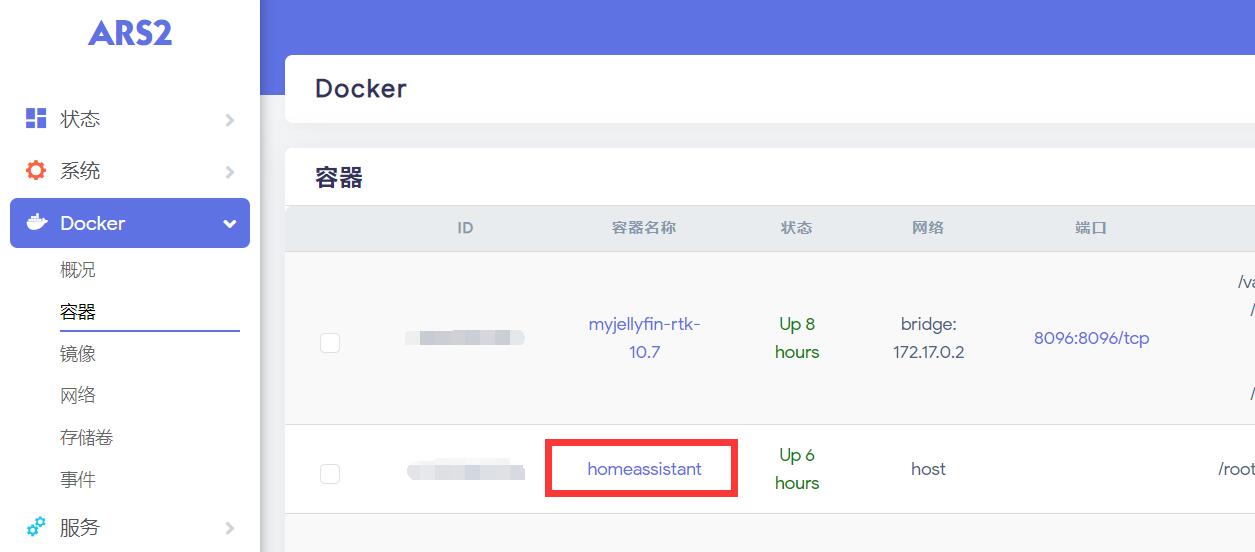
# 4.浏览器打开设备对应IP加上8123端口,例如 http://ars2.lan:8123/ (opens new window) ,即可进入homeassistant控制台。

# Node-RED
Node-RED,这个项目是由IBM新兴技术服务团队构建的可视化物联网编排工具,可基于浏览器的流程编辑器连接设备、服务器和API应用。可以将Home Assistant接入Node-Red实现自动化。
# 1.Docker拉取node-red镜像,进入终端,输入下面的命令并回车运行;
docker pull nodered/node-red

# 2.接着继续输入如下命令并回车运行,创建node-red容器(先别直接复制输入,下方有说明);
docker run -d --name="nodered" \
--net=bridge \
--restart unless-stopped \
-e TZ="Asia/Shanghai" \
-p 1880:1880/tcp \
-v /root/node-red/nodered:/data:rw \
nodered/node-red
说明:
/root/node-red/nodered 用来存放node-red的数据文件,按需修改。

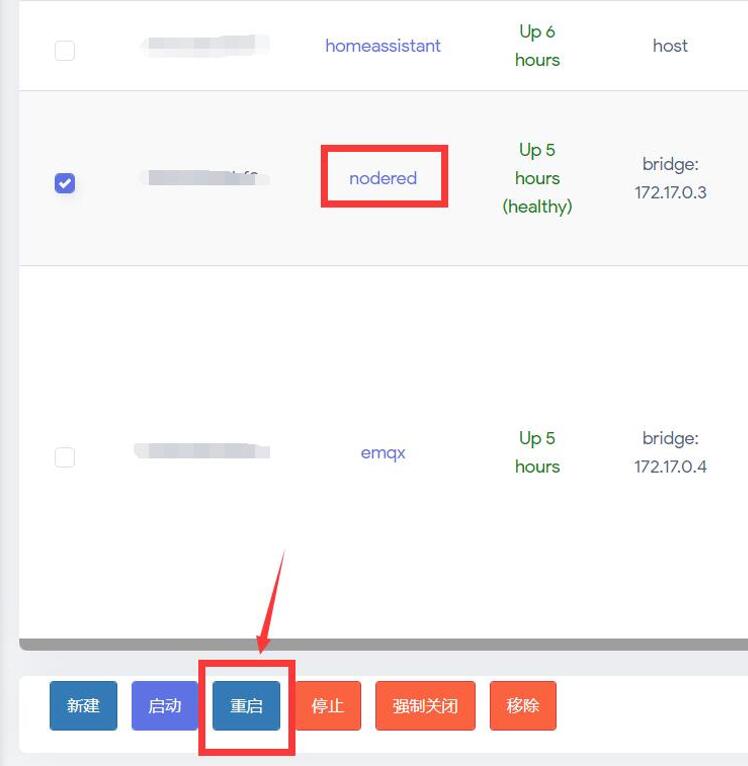
# 3.接着输入以下命令(解决node-red容器启动不了的bug);
chmod -R 777 /root/node-red/nodered

# 4.上面3条命令完成以后,管理界面—Docker—容器,找到node-red重启,然后node-red就运行起来了;
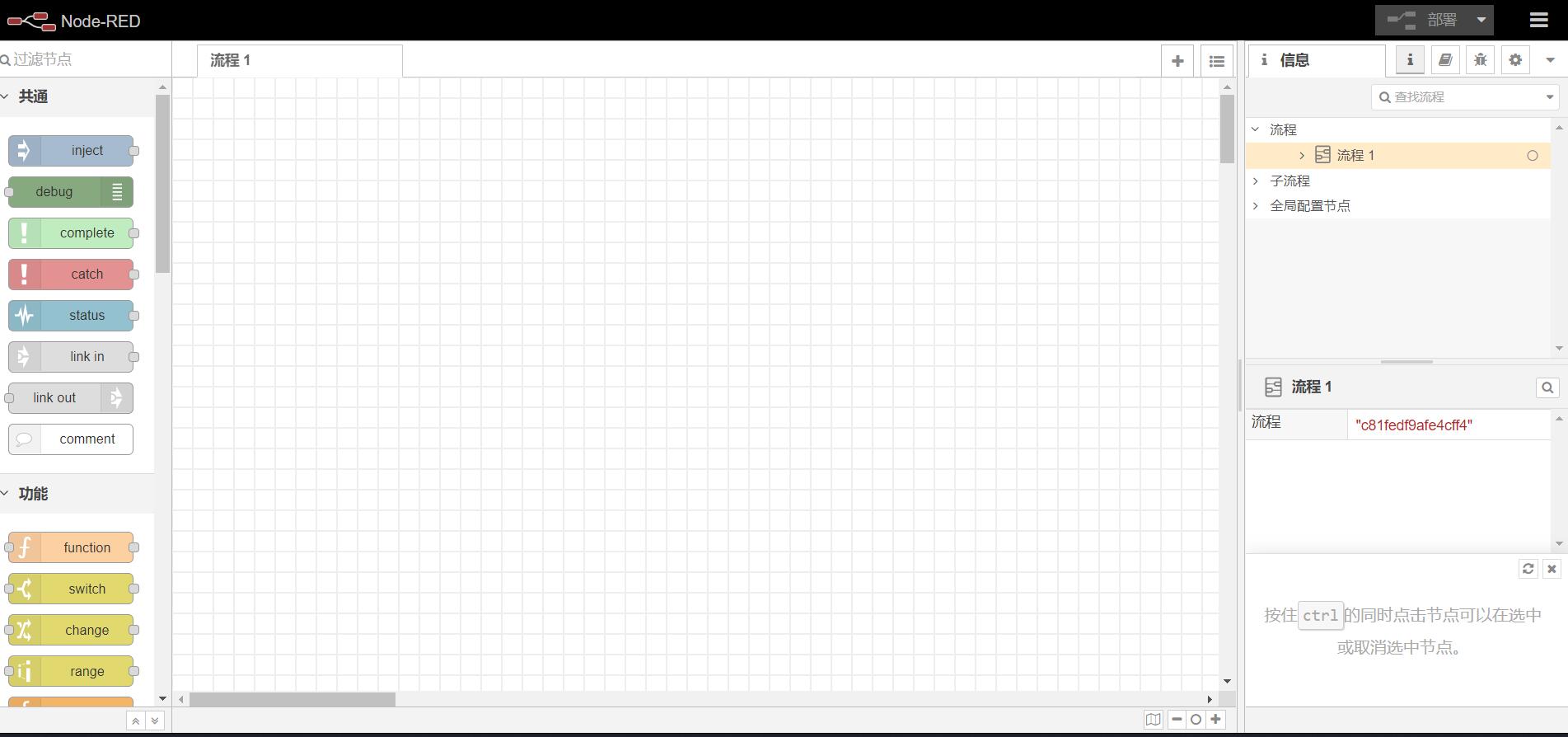
# 5.浏览器打开设备对应IP加上1880端口,例如 http://ars2.lan:1880/ (opens new window) ,即可进入node-red控制台。
# MQTT-EMQX
EMQX基于Erlang/OTP平台开发的MQTT消息服务器,是开源社区中最流行的MQTT 消息服务器,支持丰富的物联网协议,包括 MQTT、LwM2M、MQTT-SN、CoAP、 LoRaWAN、 HTTP和WebSocket等。
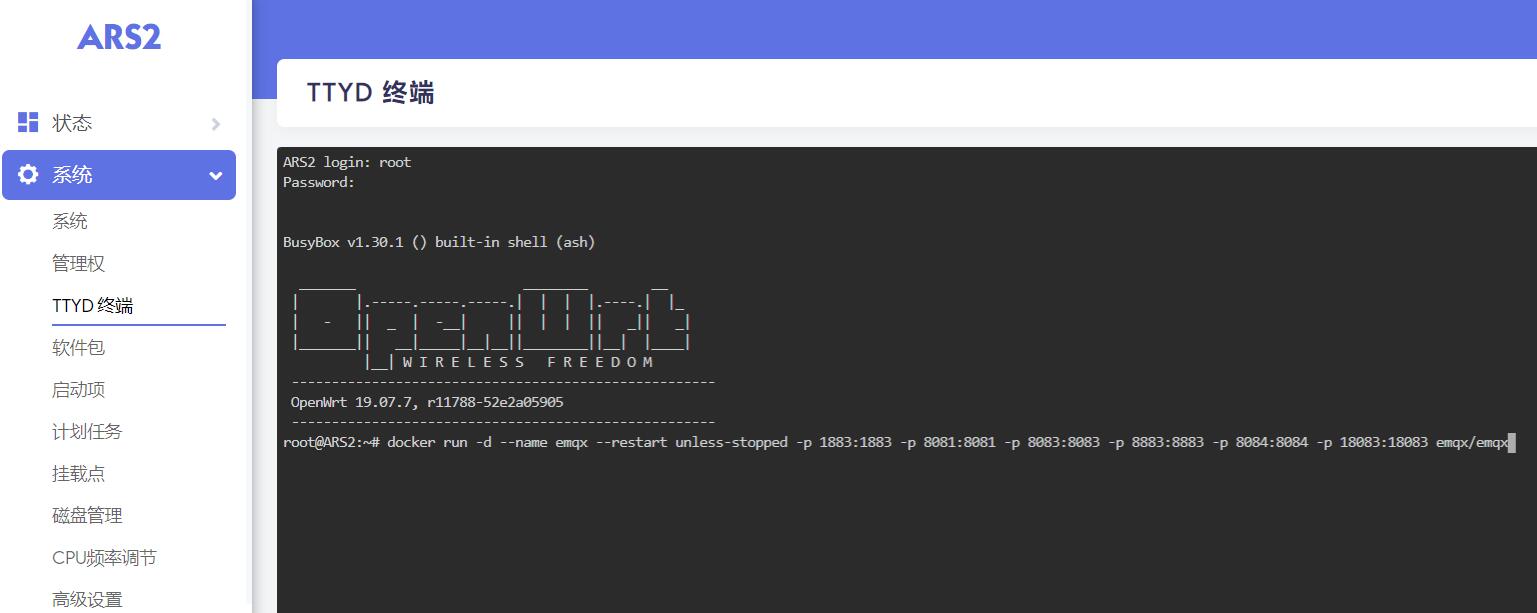
# 1.Docker拉取emqx镜像并创建容器,进入终端,输入下面的命令并回车运行;
docker run -d --name emqx --restart unless-stopped -p 1883:1883 -p 8081:8081 -p 8083:8083 -p 8883:8883 -p 8084:8084 -p 18083:18083 emqx/emqx
# 2.上面命令完成以后,管理界面—Docker—容器,就能看到emqx已经运行起来了;
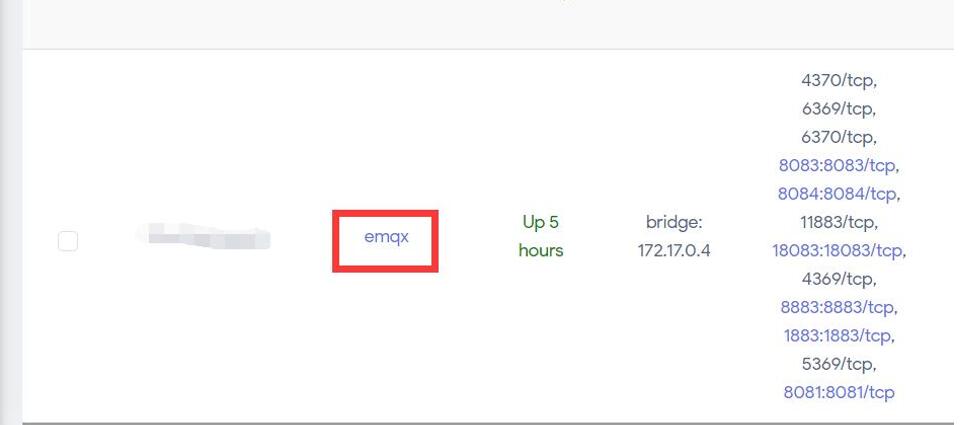
# 3.浏览器打开设备对应IP加上18083端口,例如 http://ars2.lan:18083/ (opens new window),即可进入eqmx控制台。
说明:
初始帐号:admin
初始密码:public
连接端口是1883
# 内网测速
HomeBox是一款优秀轻量的本地内网测速工具。
# 1.从iStore安装HomeBox插件;

# 2.安装以后,启用后并“打开HomeBox”;
# 3.在Download(下载)和Upload(上传)项目下,点击“Start”即可进行内网测速。

# Nextcloud
Nextcloud是一款开源免费的私有云存储网盘项目,可以让你快速便捷地搭建一套属于自己或团队的云同步网盘,从而实现跨平台跨设备文件同步、共享、版本控制、团队协作等功能。它的客户端覆盖了Windows、Mac、Android、iOS、Linux 等各种平台,也提供了网页端以及 WebDAV接口,所以你几乎可以在各种设备上方便地访问你的云盘。
# 1.先安装数据库mariadb:Docker拉取mariadb镜像并创建容器,进入终端,输入下面的命令并回车运行(先别直接复制输入,下方有说明);
docker run -d --name mariadb \
-p 3344:3306 \
-e MYSQL_ROOT_PASSWORD=123456 \
-v /root/nextcloud/mariadb:/var/lib/mysql \
--restart unless-stopped \
mariadb:10.5.12
说明:
MYSQL_ROOT_PASSWORD=123456 设置数据库root账户密码,设置为123456,按需修改。
3344:3306 将mariadb数据库的3306端口映射为3344,按需修改。

# 2.再安装Nextcloud:Docker拉取nextcloud镜像并创建容器,进入终端,输入下面的命令并回车运行(先别直接复制输入,下方有说明);
docker run -d --name nextcloud \
-p 3333:80 \
-v /root/nextcloud/html:/var/www/html \
-v /root/nextcloud/data:/var/www/html/data \
-v /root/nextcloud/apps:/var/www/html/custom_apps \
-v /root/nextcloud/config:/var/www/html/config \
--restart unless-stopped \
nextcloud
说明:
/root/nextcloud/html Nextcloud主文件夹的映射目录,按需修改。
/root/nextcloud/data 实际数据的映射目录,按需修改。
/root/nextcloud/apps 安装/修改的应用程序的映射目录,按需修改。
/root/nextcloud/config 本地配置文件的映射目录,按需修改。
3333:80 将nextcloud的访问端口映射为3333,按需修改。

# 3.上面2条命令完成以后,管理界面—Docker—容器,就能看到mariadb和nextcloud运行起来了;
# 4.浏览器打开设备对应IP加上端口3333,例如 http://ars2.lan:3333/ (opens new window) ,访问nextcloud进行配置(建议稍微等几分钟再配置,等待数据库完全运行。)。
说明:
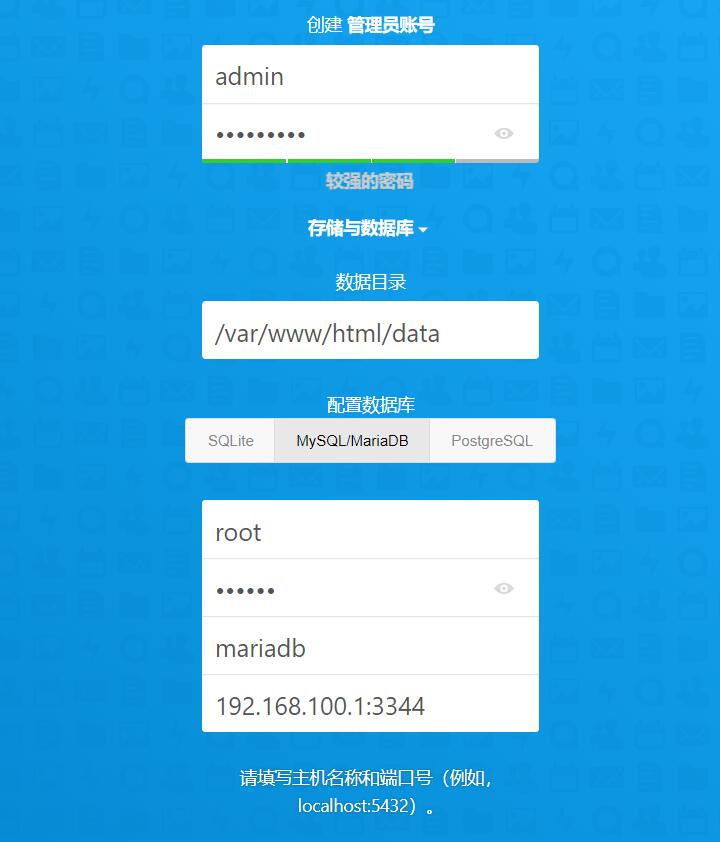
管理员帐号和密码,自行设置,按自己喜好。
存储与数据库设置:
1.数据目录不用管
2.配置数据库——选择“MySQL/MariaDB”
数据库用户名:root
数据库密码:123456 (前面设置为123456,若自己修改了填写为修改的)
数据库名字:mariadb (默认就是这个)
数据库地址:设备ip+3344 (前面设置为3344,若自己修改了填写为修改的)
3.安装推荐应用,看自己需求。
4.最后就是安装,等待安装完成,就会自动进入Nextcloud界面。

# 阿里云WebDav
阿里云盘WebDAV服务,主要使用场景为配合支持WebDAV协议的客户端(App如:Infuse、nPlayer)等实现直接观看云盘视频内容,支持上传文件,但受限于WebDAV协议不支持文件秒传。
# 1.从iStore安装阿里云WebDav插件;

# 2.打开服务——阿里云盘WebDav:
Refresh Token:根据教程获取Token,并填入,Refresh Token很容易失效,基本三五天就要更换一次
启用:勾选
主机:即ARS2的IP,默认情况下填192.168.100.1,演示机为192.168.2.100
端口:随意,只要不冲突,这里假设使用8888
用户名和密码:一般自动默认为ARS2的登录密码,也可以自行更改
其余选项默认,然后保存应用

# 3.阿里云盘WebDav运行起来后,就可以访问了,比如浏览器打开 http://ars2.lan:8888/ (opens new window):
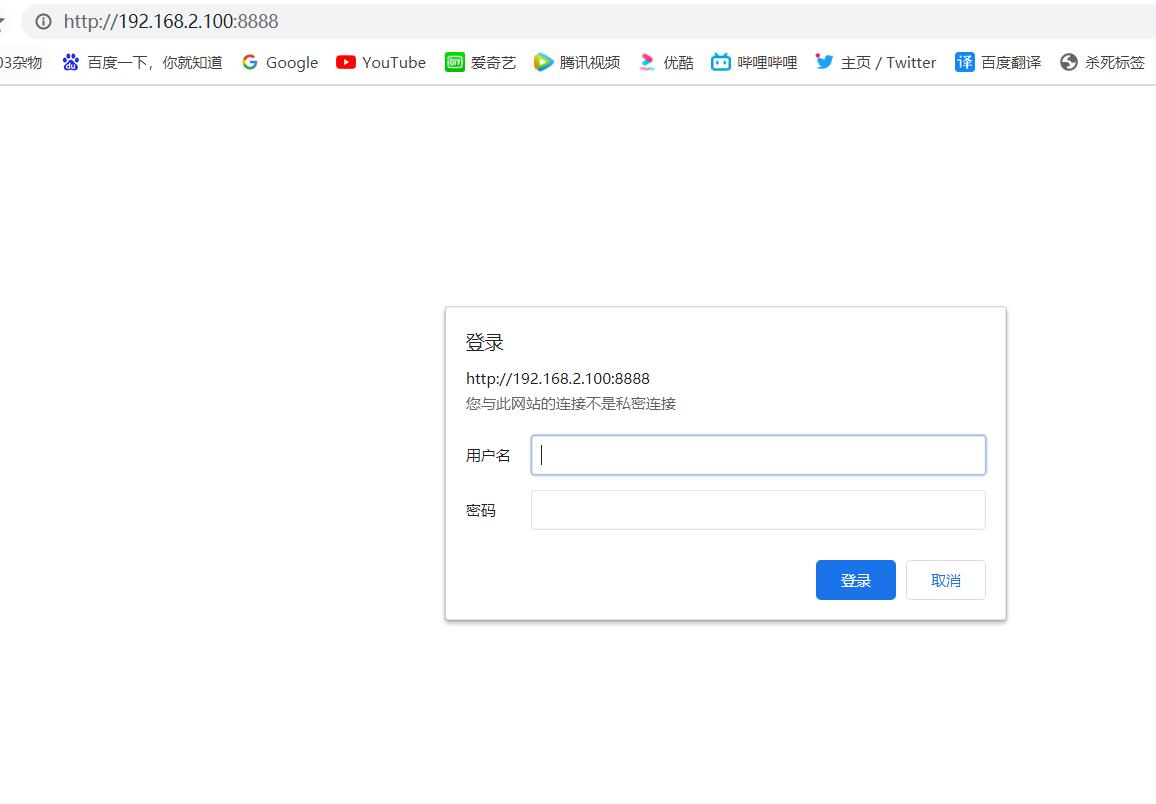
输入用户名和密码,就直接访问阿里云盘了。
其他支持WebDav的客户端同理。
# Portainer-CE
Portainer-CE是docker的图形化管理面板,提供一个后台页面方便操作docker。
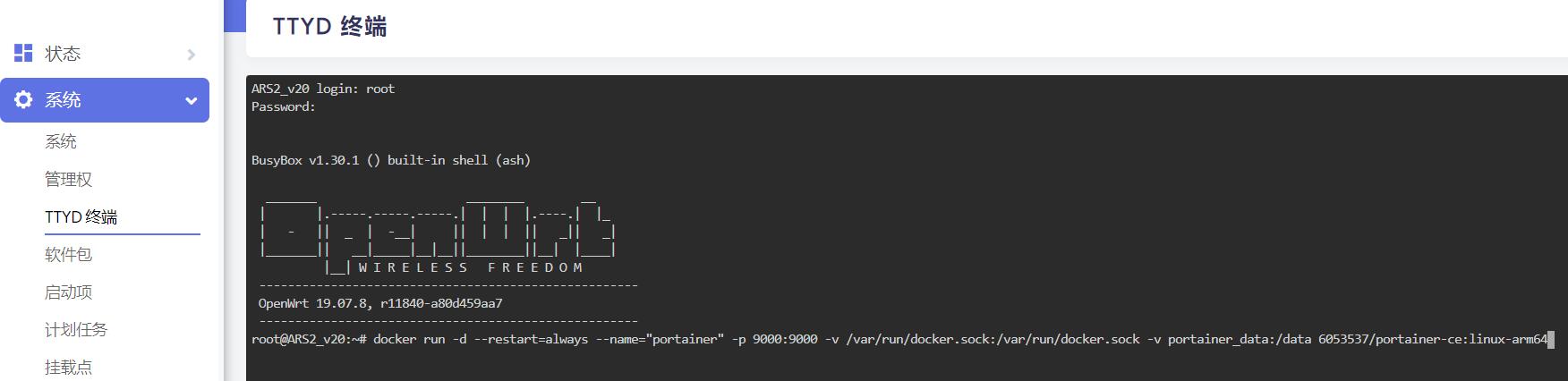
# 1.终端输入命令,一键安装Portainer-CE中文版;
docker run -d --restart=always --name="portainer" -p 9000:9000 -v /var/run/docker.sock:/var/run/docker.sock -v portainer_data:/data 6053537/portainer-ce:linux-arm64
# 2.安装完毕,浏览器打开设备对应IP加上9000端口,例如 http://ars.lan:9000/ (opens new window), 进入Portainer-CE;
- 创建用户名和密码,即可进入到Portainer-CE界面。


# 混杂模式MACVLAN
Linux原始的macvlan没有混杂模式,打开混杂模式也会过滤掉不是发给自己的报文。
ARS2的内核改变了这个行为,混杂模式的macvlan可以接收到宿主接口的所有报文,除了单播给宿主接口的报文。
应用场景:使用混杂模式macvlan,将WAN口的报文转发到一个网桥中,加入此网桥的虚拟网卡即可加入宿主机WAN口所在的局域网,获得局域网IP。以Docker为例:
HOST_WAN=eth0
ip link add macv-docker-wan link $HOST_WAN type macvlan mode private
ip link set dev macv-docker-wan promisc on
ip link add br-docker-wan type bridge
ip link set dev macv-docker-wan master br-docker-wan
ip link set dev macv-docker-wan up
docker network ls -f "name=docker-wan" | grep -q docker-wan || \
docker network create -d bridge -o "com.docker.network.bridge.name=br-docker-wan" docker-wan
echo "0" > /proc/sys/net/bridge/bridge-nf-call-iptables
创建容器并加入docker-wan网络:
docker run --net=docker-wan debian
Docker会给容器分配IP,但这里用不上,容器内执行以下命令获得局域网IP:
ip addr flush dev eth0 && udhcpc